“GNSS interference is now considered a routine operational hazard in many maritime environments.” (Royal Institute of Navigation, 2026)
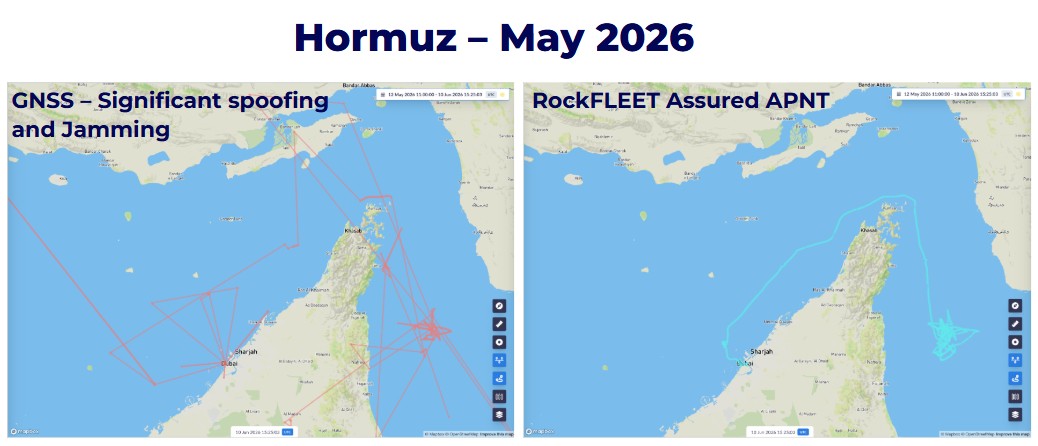
The issue of GNSS jamming and spoofing is of increasing concern to the maritime industry. Hundreds of vessels of vessels are reported to be exhibiting abnormal AIS behavior consistent with GNSS interference across the Arabian Gulf and Strait of Hormuz, with similar reports from the Red Sea and Baltics. Add to which collisions or groundings in 2025 linked directly to GNSS interference, and it’s clear that the risks associated with GNSS denial are growing, and with considerable operational impact.
Ground Control recently hosted a webinar with Andy Proctor (Rethink PNT), VP Royal Institute of Navigation, to discuss some of the deeper impacts of this activity, how it’s affecting maritime operations on a global scale, and what can be done to tackle the increasing risks. Here are our five key takeaways from the session.
1. GNSS disruption is becoming part of normal operations
For many operators, GNSS interference is no longer an exceptional event that only occurs in conflict zones. Reports from UK Maritime Trade Operations (UKMTO), the Joint Maritime Information Center (JMIC) and the Royal Institute of Navigation (RIN) demonstrate that jamming and spoofing are increasingly encountered in ports, strategic waterways and busy shipping routes. As interference becomes more widespread, voyage planning and bridge operations must account for the possibility that GNSS services may be degraded or unavailable during normal operations.
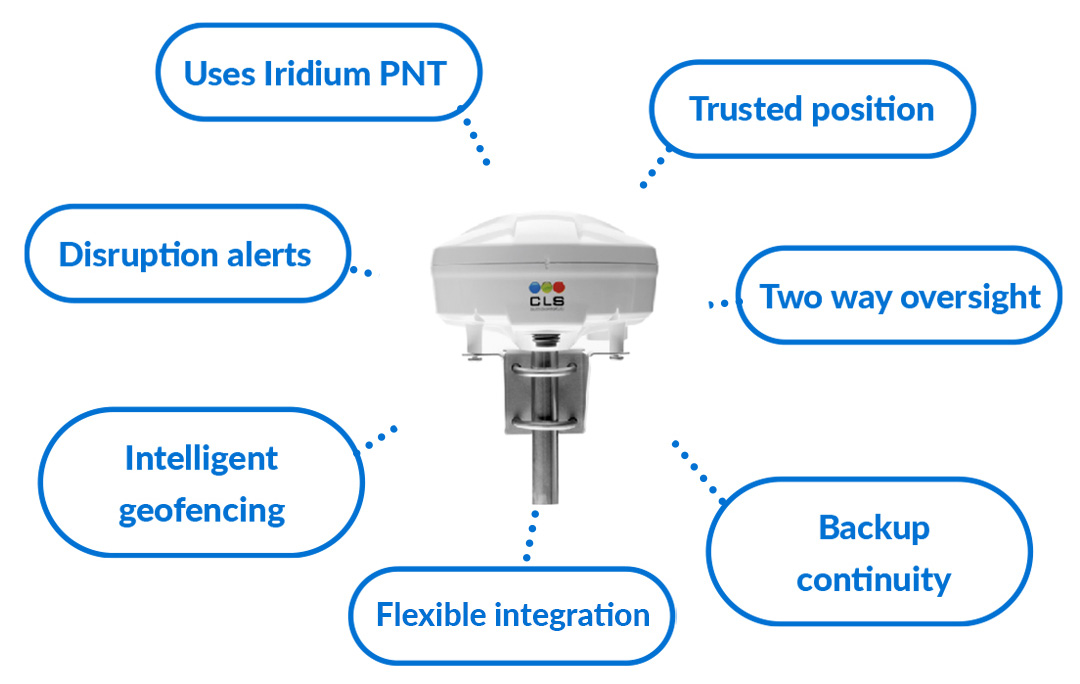
Preparing for GNSS disruption starts with understanding where interference is most likely to occur and ensuring bridge teams know how to recognize and respond when it does. Independent positioning technologies, such as Alternative Positioning, Navigation and Timing (A-PNT), provide an additional layer of resilience by maintaining an independent position reference when GNSS integrity is compromised.
Check: Do your crews know where GNSS disruption is most likely to occur on their routes?
2. Position data supports far more than navigation
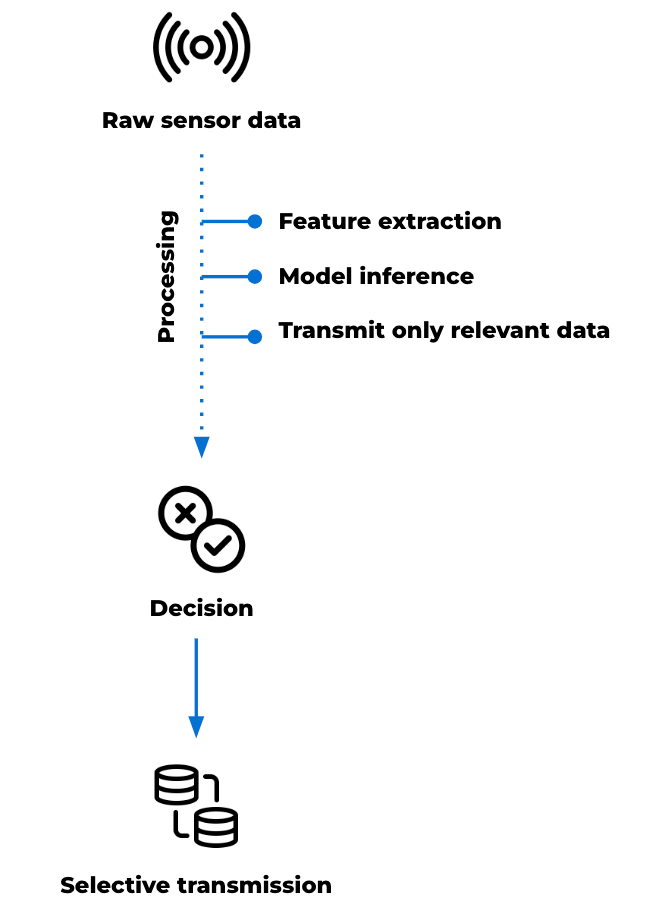
Modern vessels share position and timing information across a wide range of onboard systems. ECDIS, AIS, radar overlays, communications, dynamic positioning, engineering systems and voyage reporting all rely, to varying degrees, on trusted GNSS-derived data. A single interference event therefore has the potential to affect multiple operational functions simultaneously, increasing bridge workload and reducing confidence in decision making.
Understanding these dependencies is becoming an important part of operational resilience. Mapping which systems consume GNSS data helps operators understand where additional verification, procedures or independent positioning capability may be appropriate. An A-PNT solution provides crews with an independent position reference that can be compared against GNSS to identify unexpected divergence before it affects operational decisions.
Check: Have you identified every system on board that depends on GNSS position or timing?
3. Spoofing creates a systemic integrity challenge
Unlike jamming, which generally results in an obvious loss of signal, spoofing introduces false but believable navigation data. Position and timing information may continue to be accepted by onboard systems, allowing inaccurate information to propagate throughout the vessel without immediately alerting the bridge team.
This makes early detection particularly important. Rather than simply identifying the loss of GNSS, resilient navigation increasingly depends on validating the integrity of the information being received.
Check: How would your bridge team recognise a spoofing event?
4. Recovery doesn’t end when the signal returns
Restoring GNSS reception doesn’t necessarily mean every onboard system has returned to a trusted operating state. Position, timing and dependent systems may all require verification before normal operations resume. Bridge teams therefore need clear recovery procedures alongside procedures for recognizing the initial interference event.
The Royal Institute of Navigation highlights that recovery should focus on restoring confidence in the vessel’s operational picture, rather than simply confirming that GNSS signals have returned. Independent position references can support this process by providing an additional source against which crews can validate navigation data during recovery.
Check: What procedures exist for validating system integrity after an interference event?
5. Resilience depends on preparation
Resilient positioning technology provides the foundation for maintaining reliable position and timing when GNSS is disrupted. Its effectiveness is strengthened by well-defined bridge procedures, crew training and a consistent approach to learning from operational incidents.
The webinar highlighted the importance of:
- Crew awareness and training
- Clear bridge procedures
- Reporting and learning from incidents
- Independent methods of verifying position and timing
- Understanding system dependencies.
Operational resilience comes from combining dependable technology with people and procedures that are prepared to respond consistently.
Check: What procedures exist for validating system integrity after an interference event?
Actions to strengthen GNSS resilience
✓ Map GNSS dependencies across onboard systems
✓ Train bridge teams to recognize jamming, spoofing and system integrity issues
✓ Review bridge procedures for interference and recovery
✓ Combine resilient positioning technology with clear procedures, crew training and operational safeguards
✓ Test navigation and safety systems under realistic interference scenarios
✓ Capture and share lessons from interference events
✓ Provide crews with practical operational guidance before entering high risk areas
✓ Monitor interference hotspots and incorporate them into voyage planning.
To learn more about GNSS resilience and maritime PNT:
- Read the Royal Institute of Navigation Maritime Interference Report (2026)
- Consider joining the Royal Institute of Navigation (RIN) and participating in its PNT Group and Maritime Navigation Group, as recommended during the webinar
- Watch the full webinar recording.
Watch: GNSS Spoofing & Jamming at Sea: Risks, Limits and Practical Responses

Building Resiliency with A-PNT RockFLEET Assured
If the webinar raises questions about your team’s resilience against GNSS denial and you’d like more information, or a demo of our RockFLEET Assured solution, complete the form and one of our technical team will be in touch.
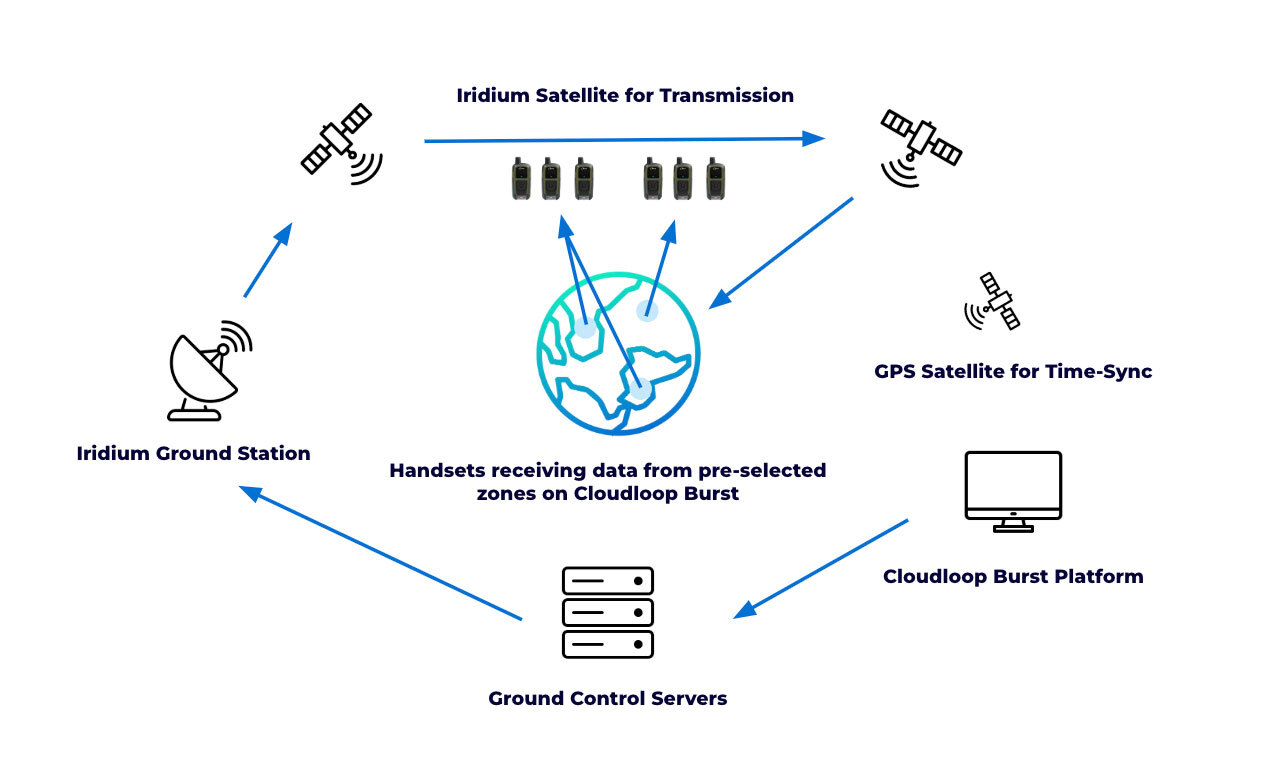
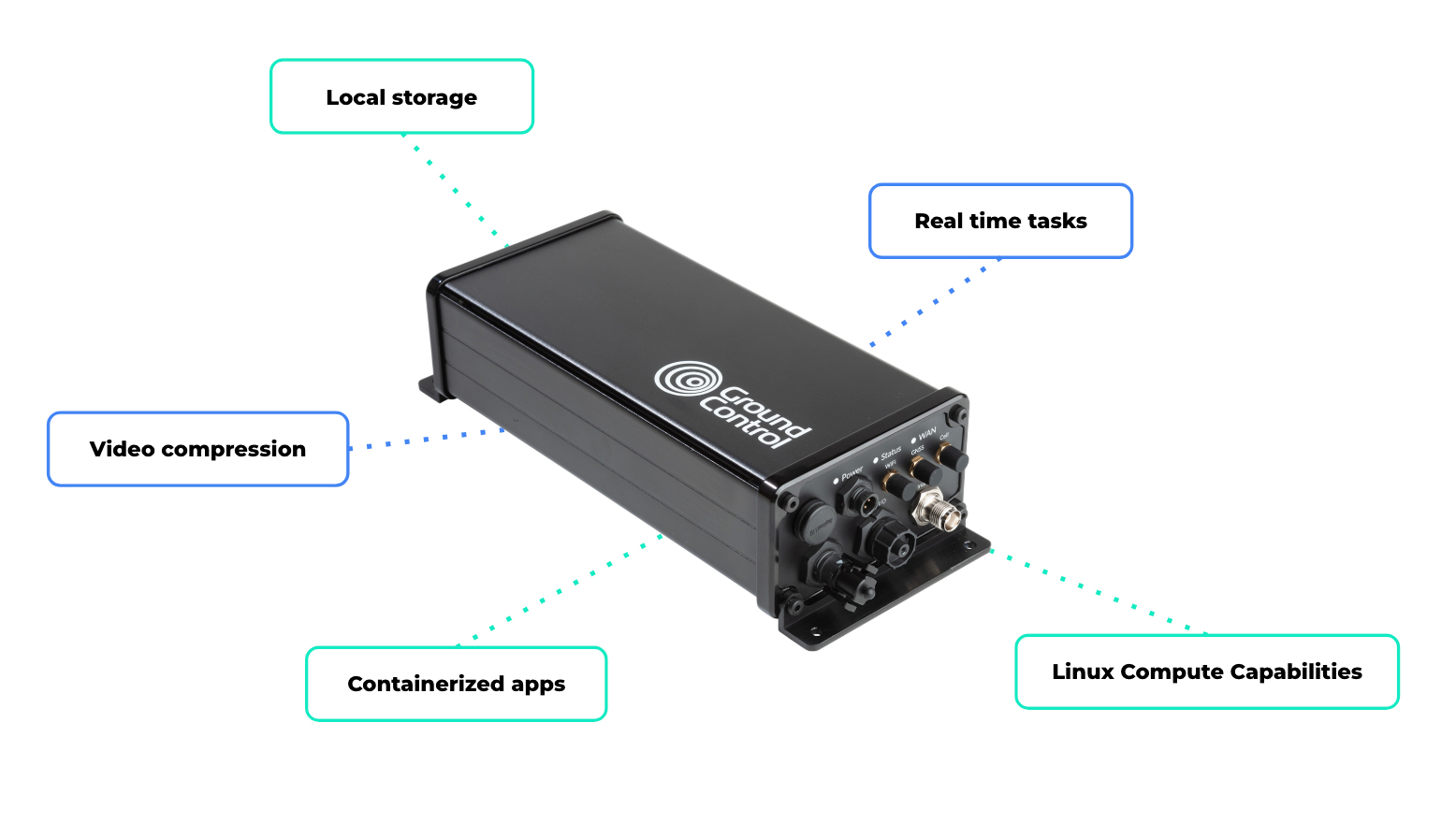
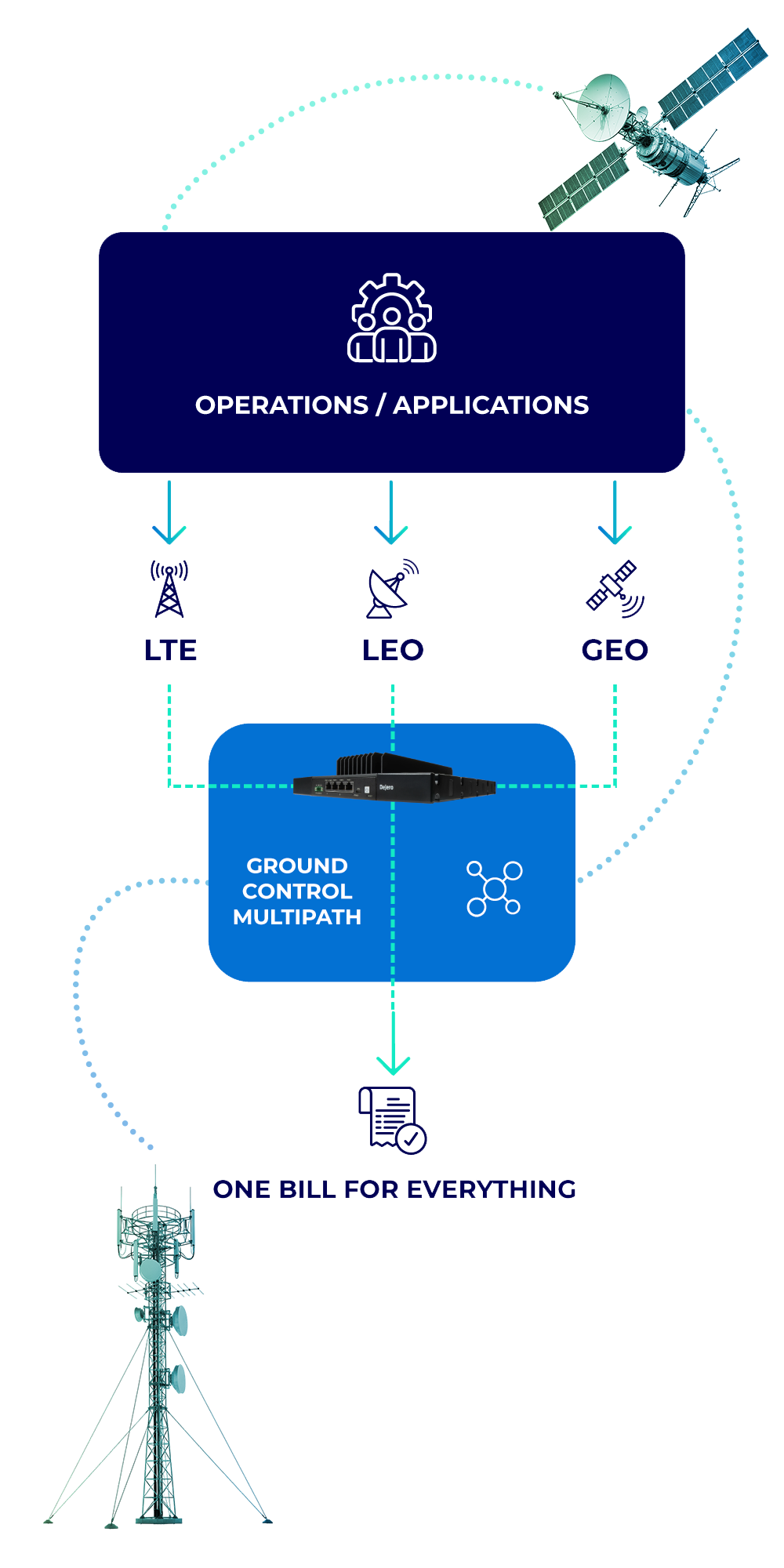
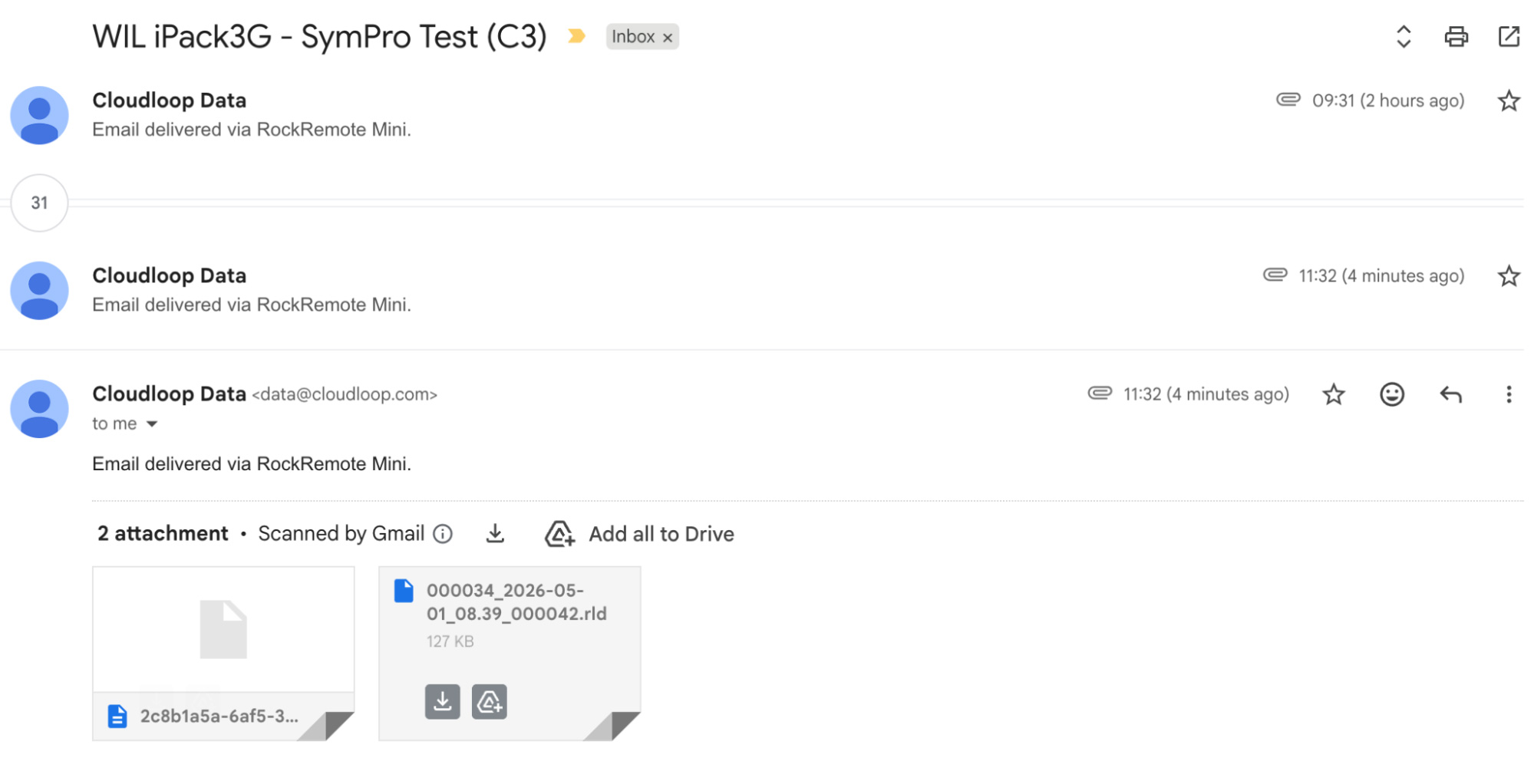
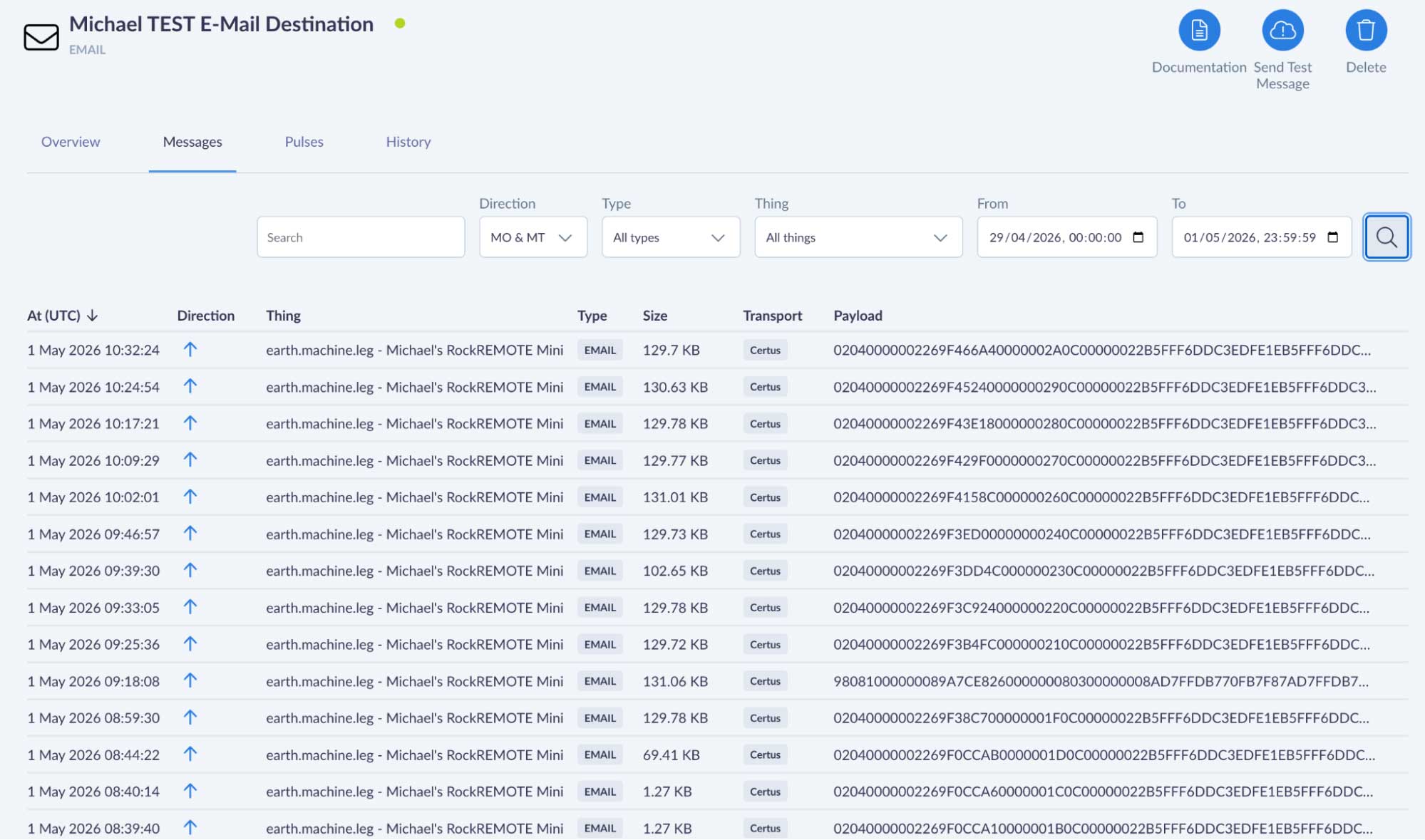
 Internally, the Mini compresses the attachment and transmits it as one or more IMT (Iridium Message Transport) messages over the Iridium Certus 100 network to Cloudloop Data. Cloudloop decompresses it and delivers it to your configured destination, which could be an inbox, a webhook, FTP server, an S3 bucket, or any other destination Cloudloop Data supports. Your device never needs to know any of this is happening.
Internally, the Mini compresses the attachment and transmits it as one or more IMT (Iridium Message Transport) messages over the Iridium Certus 100 network to Cloudloop Data. Cloudloop decompresses it and delivers it to your configured destination, which could be an inbox, a webhook, FTP server, an S3 bucket, or any other destination Cloudloop Data supports. Your device never needs to know any of this is happening.

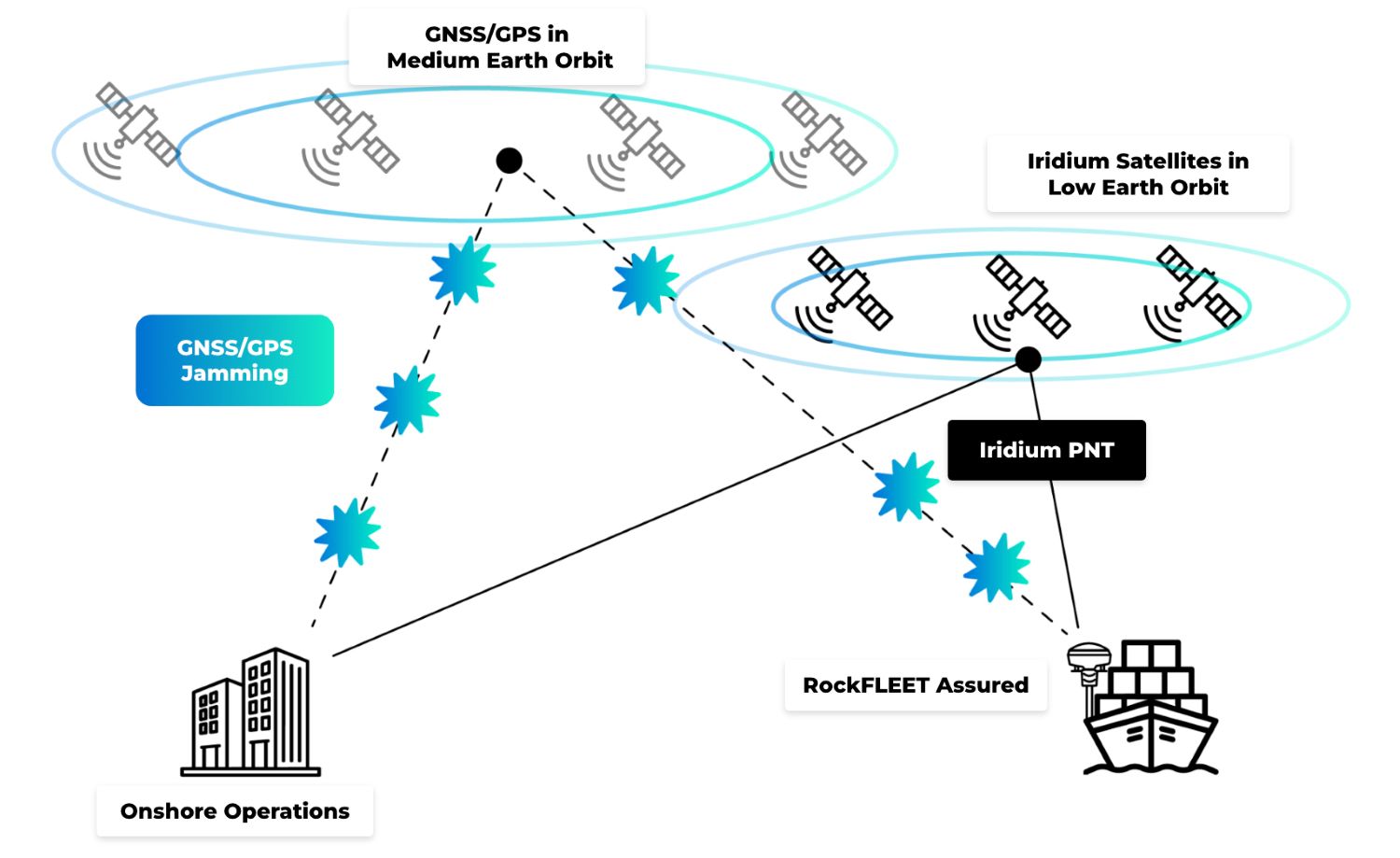 A-PNT technologies are designed to address this challenge by adding independent sources of trusted positioning, navigation or timing information when GNSS integrity becomes unreliable. The objective is to help operators determine whether the position information they are using can be trusted.
A-PNT technologies are designed to address this challenge by adding independent sources of trusted positioning, navigation or timing information when GNSS integrity becomes unreliable. The objective is to help operators determine whether the position information they are using can be trusted.